Vehicular Networked Systems (VNS) consist of numerous vehicles coordinating their operations by exchanging information over a wireless radio communication network. VNS represents one type of mobile ad hoc networks that have been deployed in a variety of safety-critical applications, such as intelligent transportation systems with Vehicle to Vehicle (V2V) communication, air transportation systems with Automatic Dependent Surveillance-Broadcast (ADS-B) and underwater autonomous vehicles with optic or acoustic communication.
One challenge of building a safe and efficient VNS lies in the unreliable wireless channels used in VNS that are often subject to state-dependent deep fades where the data rate suffers a severe drop and changes as a function of vehicle states. With limited communication resources (e.g., V2V networks with 10-MHz bandwidth only handles at most 50 vehicles) in VNS, resilience of VNS will be seriously compromised under periodic communication schemes where wireless channels will easily get congested if a large number of vehicles join the network. To address this challenge, our group developed a novel event-based communication scheme, under which both system safety and efficiency are attained for VNS with state-dependent bursty fading channels. The novelty of our work lies in its effective use of the state-dependent property of vehicular fading channels in the event design ensuring that communication resources, such as bandwidth and transmission power, are allocated adaptively in response to unexpected channel failures. In comparison to periodic and traditional event-triggered communication schemes, our results showed that the proposed event-based schemes are more resilient against unexpected channel failures due to its event-based adaptive structure.
Event-triggering in Driverless Cars with State-dependent Bursty Fading Channels
One important application of VNS is the self-driving cars that are most likely deployed in the near future. In these self-driving vehicles, both on-board sensors and V2V communication systems are equipped to ensure safe and efficient operations. The following demonstrates a leader-following example, which is a basic and important operation for self-driving vehicles.
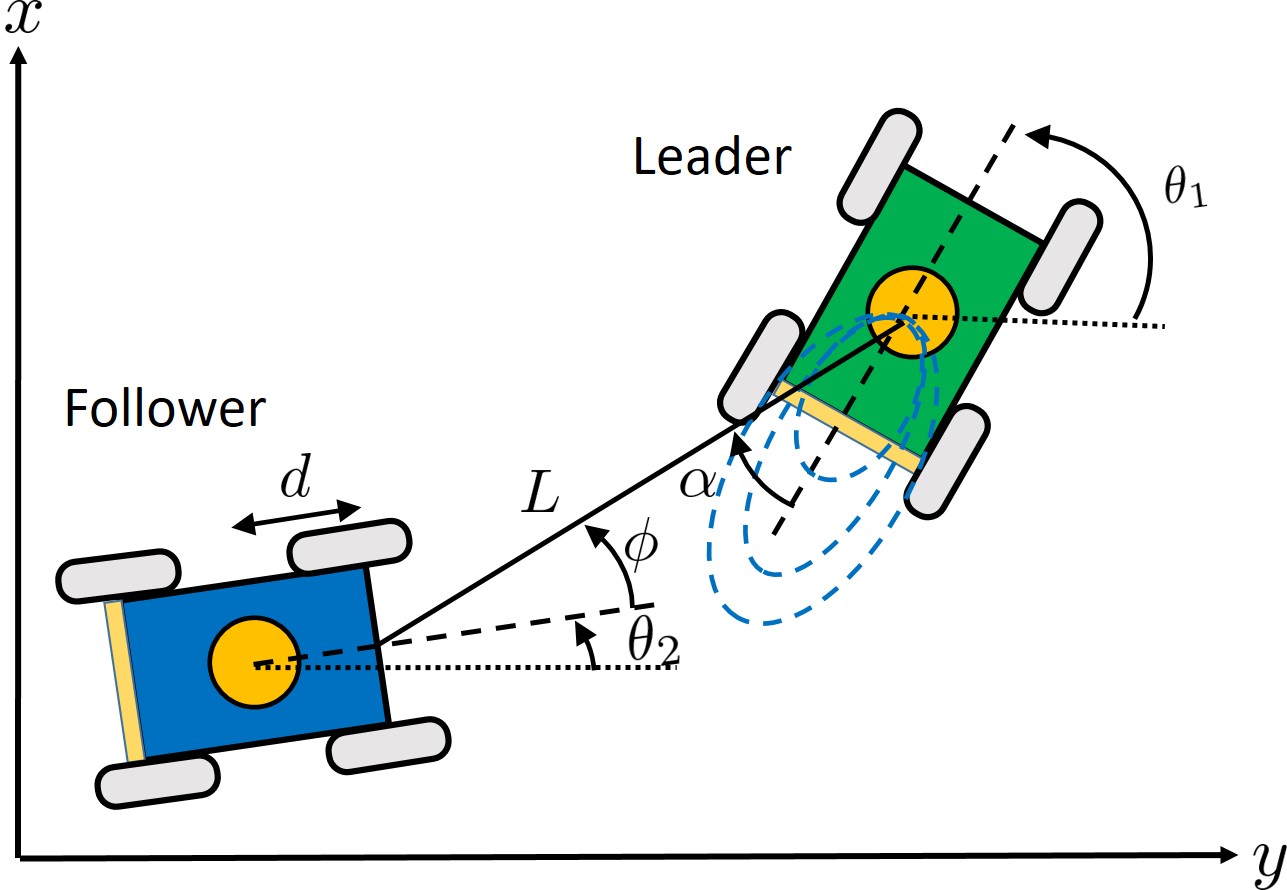 |
The objective of the leader-following system is to have the follower vehicle to maintain a desired distance (lane keeping operation) and angle (lane changing operation) with respect to the leader vehicle. To achieve such leader-following objective, the follower vehicle use its onboard sensor (e.g., Lidar) to measure the distance between vehicles (\(L\)) and obtain the leader's angle information (\(\alpha\)) through V2V communication. |
Leader-follower Formation Control under Traditional Event-triggering
 |
Leader-follower Formation Control under Proposed Event-triggering
 |
Event-triggering in Networked Unmanned Aerial Vehicles: Three-Dimensional Framework
 |